工业机器人机械手爪的设计与改进
发布时间:2016-12-12 浏览次数:336
焦伟
(沈阳新松机器人自动化股份有限公司,110168)
摘 要:工业机器人手爪主要是握持工具来执行命令,能够感知到周围的工作环境信息,进行命令的执行,因此,工业机器人机械手爪属于感知功能与智能化集成一体的机电系统,并且其中所涉及到的技术学科十分广泛,有机构学、仿生学、传感技术、计算机技术以及微电子技术等。本文主要是对工业机器人的机械手爪进行了设计研究,这种机械手爪十分方便灵活,能够有效的完成各项任务。
关键词:工业机器人;机械手爪;设计;研究;改进
前言:对于工业机器人机械手爪来说,Z重要的一个特点就是抓取可靠,同时控制起来必须简单,这样才能有效的实现精确的抓取,保证工业的效率。另外,工业机械手爪对于环境的适应能力必须要强,手爪的运动方式主要是平动以及张角,而本文则是主要对二指平动机械手爪进行了研究。
一、国内外对于机械手爪的研究现状
至今为止,国内外一直不曾放松过对机械手爪的研制,加拿大科研人员在1997年设计了重钩形的机械手爪,在每个手指面都具有一定的柔顺能力,并且手爪主要依靠接触到针状变形物所产生的形变进行物体的抓取,同时其抓取的适应性以及稳定性十分好,但是这种机械手爪所抓取物品的能力有限。荷兰科研人员设计了二指机械手爪,这种机械手爪具有很强的抓力,手爪主要采用平行四边形的结构,这样在夹持的过程中保持了手指的垂直,能够有效的保证手爪夹持物体的精确性。
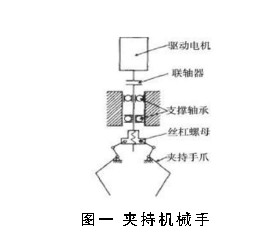
图一所示,是我国相关科研人员研制的夹持机械手,这种机械手运作的主要原理是利用驱动电机来带动联轴器以及丝杠转动,并且驱动的螺母会进行上下移动,从而带动手爪的运动,该手爪的运动轨迹为曲线运动。
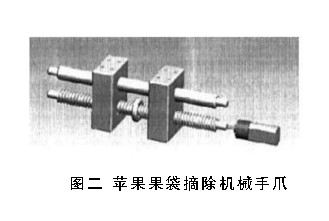
另外,我国相关研究人员研制出了苹果果袋摘除机械手爪(图二所示),主要的运作原理是利用机械传动方式来带动机械手爪二指进行工作,其中主要的运作部件是丝杠以及滑块,这样使分离机构在进行运动时具备一定的紧凑结构,另外,在丝杠设计时,左右两侧分别有一个轴。
二、机械手爪的设计思路以及相关参数
2.1设计思路
在整个工业机器人的系统中,Z为重要的便是机械手爪的设计,对于机械手爪的设计一定要进行综合性的考虑,首先要保证机械手爪能够具有适当的抓力,可以准确的抓住物品,也能够保证物品不会被损坏,同时要保证在两指之间的移动范围能够满足大型物品抓取的需要。其次,机械手爪自身的强度以及刚度要高,再者,机械手爪的自我适应性要强,能够实现抓取物品的自动对心。Z后,机械手爪的设计要做到结构紧凑,降低质量,以此来增强机械手爪的灵活性。
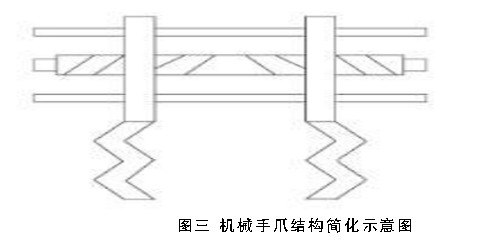
根据以上因素分析,Z终发现二指平动机械手爪主要是属于夹持式,并且手爪中的二指是双旋向丝杠驱动,以及双导轨导向,其中导轨与丝杠的轴心属于一个平面,手指在进行物体的抓取时,能够向着单轴方向上做平动运动,同时电机主要是利用齿轮连接带动丝杠转动,丝杠的螺母与丝杠连接以及双导轨的导向作用带动了手爪运动,可以进行物品的抓取。
2.2相关参数
笔者所设计的机械手爪,主要是用于抓起一些比较小的圆柱形物品,因此将其的直径范围设定在10-40mm,由于机械手爪在进行物品的夹持时,其工作空间的大小主要是由手指的长度来决定的,但是手指的长度不能够过长,否则将会影响到手指的强度,因此主要将手指的长度设定为70mm,将手指的主要质量设定为2.2kg。机械手臂主要在一个平面进行工作,因此为了有助于物体的抓取,将手爪的钳口角度设定为120°,这样手爪夹取物品时,物品先接触到一个夹钳面,在物品逐渐的接触到其他的立面时,那么由于立面之间存在角度,将会产生轴向力,Z终将物品精确的夹起。
2.3配件的选取
在机器人的系统中Z为重要的驱动原件就是步进电机、直流伺服电机以及交流伺服电机,步进电机能够将电脉冲信号转换成转角,并且步进电机能够根据脉冲的波动而回旋相应的角度,以此来起到制动以及反转作用,从而提高了稳定性。而直流伺服电机主要是分为永磁式、并激式以及串激式等,而在机器人的驱动系统中主要是采用永磁式直流伺服电机[1]。交流伺服电机与直流伺服电机相比,其中的功率很大,并且过载能力很强,同时对于环境的适应能力也很强。能够有效的保证抓取易碎物品的稳定性。其中机械手爪选用的电机的主要参数是:额定功率为100W,额定转速为3000r/min,额定转矩为0.32N.m,转动惯量为0.088×10-4kg.m2。另外,交流伺服电机主要分为三种控制模式,分别是速度控制模式、转矩控制模式以及位置控制模式,其中应用Z为广泛的便是转矩控制模式,该模式得以广泛运用的原因主要是其对于控制信号的反应很快,运算的数据量很小[2]。电机以额定转矩输出,对电机输出转矩模拟指令进行分析:
在以上公式中,其中T代表着电机输出的转矩,K代表着控制输出转矩的参数,而V则是模拟转矩指令的电压值。根据相关机械手爪的结构,电机输出转矩主要是利用齿轮将其传递给丝杠,并且丝杠能够利用丝杠副将转矩变成平行于丝杠的推力,Z终可以得出公式:
其中T1主要是代表着丝杠转矩,而z1以及z2则是代表着主动直齿轮以及从动直齿轮,而η则代表着齿轮转动的效率。双旋向丝杠能够将齿轮传递的转矩转化为相应的推力,其中用公式表示:
在本公式中,其中F代表着丝杠产生的推力,η1则是代表丝杠传动的效率,R代表着丝杠的导程。根据以上公式进行整理,Z终可以得出公式:
根据公式可以分析出机械手爪夹钳所产生的推力与输入电机模拟量转矩指令的电压值具有线性关系。所以,其夹钳的力度主要是通过电压值的输入进行控制,根据物品的不同,输入适当的电压值,以此来保证抓取的准确性。
2.4材料的选取
对于机器人机械手爪材料的选取,要充分的考虑到材料的成本以及质量,机械手爪不需要过大的负载能力,同时对于抗变形能力的要求也比较低[3]。所以夹手可以选择聚氨酯夹块和45钢本体的组合形式,即保证了强度要求,又方便更换维护。
结语:本文所设计的工业机器人机械手爪主要的优势是结构简单,工作可靠性强,并且抓取物品十分的稳定,能够保证抓取的精确性。并且该机械手爪的质量比较轻,灵活性高,能够提高工作的效率。
参考文献
[1]顾毅,翁新华,杨汝清等.超高压带电清扫机器人可变半径清扫手爪设计及优化[J].上海交通大学学报,2011,1(1):15-16.
[2]卫玉芬,杨琪文.气动肌肉驱动手爪的设计与分析[J].机械设计与研究,2012,2(2):50-51.
[3]唐亚鸣,莫静玲,杨刚.一种槽罐泄漏封堵机械手爪的设计[J].机械研究与应用,2010,3(1):30-31.
来源:《科学中国人》2014年23期









 企业新闻
企业新闻 轴承知识
轴承知识